水下航行器是深海探测、海洋工程与国防装备的核心载体,其水动力稳定性、流噪声水平、空化可靠性与复杂运动适配性,直接决定装备的作战性能、隐蔽性与服役寿命。在正向研发体系中,高精度数值仿真替代高成本水池试验、海上试错,成为航行器外形优化、降噪设计、多工况迭代的核心手段。但多数研发团队普遍存在困惑:市面上的水下仿真软件精度是否靠谱?能否支撑大规模、系统级、高瞬态的复杂水下工况计算?针对水下仿真普遍存在的算力昂贵、精度不足、耦合缺失等痛点,秩益科技自主研发的DIMAXER工业仿真软件,依托自研创新算法与高效计算框架,打造百亿自由度大规模仿真能力,提供“前处理-求解-后处理”全流程、高精度、低成本水下仿真解决方案,全面助力水下航行器设计优化、噪声控制及复杂运动场景仿真落地。

传统水下航行器仿真四大核心痛点,精度效率双重受限
水下流场具备高雷诺数、高瞬态、多尺度、多相耦合的复杂特性,传统通用仿真软件存在明显技术短板,难以满足高端装备研发标准。首先是多尺度与算力矛盾突出,水下湍流雷诺数高达10⁶–10⁷量级,需同时解析毫米级近壁边界层与米级远场尾流。传统RANS模型过度简化丢失精细流场细节,高精度LES方法则需要上亿级求解点网格,依赖顶级超算持续运行数月,硬件与运维成本极高,产品迭代效率极低。
其次是时空解析能力不足,水介质声速约1500m/s,水下压力脉动为微秒级高频信号,传统时间平均算法无法捕捉瞬时脉动与涡脱落特征,导致水下流噪声预测误差极大,无法满足潜艇、航行器严苛的降噪设计需求。同时存在系统级仿真缺失问题,传统软件仅能做局部部件仿真,无法实现螺旋桨-船体耦合、推进器-附体干扰、空化-湍流耦合等系统级多场联动计算,难以支撑整机协同优化。最后是空化模拟精度受限,传统经验空化模型无法精准还原微秒级气泡生成、溃灭过程,工程中空化位置、强度预测误差超30%,严重制约装备减阻降噪与抗蚀结构设计。
DIMAXER技术突破,打造高靠谱水下专用仿真能力
秩益科技DIMAXER完全突破传统仿真技术瓶颈,依托自研高阶STE-KEP-FR算法与GPU全异步并行框架,针对性解决水下仿真算力贵、精度差、场景受限等难题,适配百亿自由度大规模计算场景。软件采用无模化直接求解湍流技术,摒弃传统经验模型束缚,搭配近壁贴体网格+远场笛卡尔重叠网格方案,在同等算力成本下,将水下流场解析尺度提升2–3倍,无需超算加持,即可完成大规模复杂算例计算,大幅降低研发迭代成本。
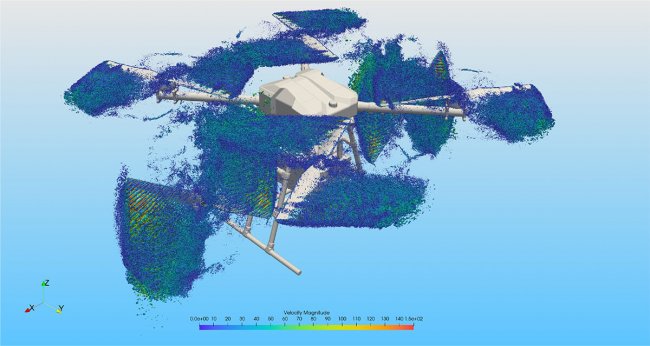
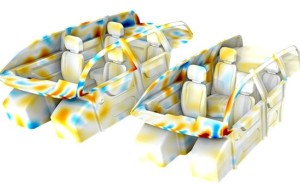
针对水下降噪与复杂运动仿真需求,DIMAXER具备超高时空分辨率求解能力,可精准捕捉微秒级压力脉动与涡结构演化,依托专属噪声预报模块,精准还原航行器非定常水动力与流噪声特性。搭配静态/动态IBM算法,完美适配鱼雷发射、多体耦合、姿态剧变等复杂动态场景。在空化与多场耦合方面,采用均相流+界面追踪双重求解方案,消除传统模型数值误差,真实还原空化瞬态物理过程,同时全面覆盖潜艇核动力、泵喷推进、泵阀两相流等系统级耦合仿真,彻底补齐传统软件系统仿真短板。
总结
整体来看,传统仿真软件受模型、算力、时空分辨率限制,无法适配现代水下航行器高精度、大规模、系统级的研发需求。而秩益科技DIMAXER国产工业仿真软件,凭借全自主底层算法、GPU高效并行架构、无模化高精度求解、百亿级大规模计算能力,有效解决多尺度算力矛盾、噪声预测失准、空化模拟偏差、系统耦合缺失等行业难题,以低成本、高精度、全场景适配的核心优势,为水下航行器外形优化、隐蔽性降噪、复杂运动仿真、多场耦合校核提供可靠的国产化全流程解决方案,是水下装备高端研发的靠谱仿真工具。